市场商业报告披露官方网站
2025年06月05日 星期四

井工矿无人驾驶解决方案 雷科智途撬动万亿级市场
中办、国办印发《关于进一步加强矿山安全生产工作的意见》已向社会公布。在9月18日国新办举行的新闻发布会上,国家矿山安全监察局副局长张昕介绍了《意见》的出台背景、主要内容、重要作用、重大意义。
《意见》指出:“要加快矿山升级改造,推动中小型矿山机械化升级改造和大型矿山自动化、智能化升级改造”和“提高科技创新支撑能力-推进矿山信息化、智能化装备和机器人研发及应用。”进一步明确了国家对于机械化换人、自动化减人、智能化无人的“绿色矿山”智能技术支持,为深入解决煤矿产业数字化转型的痛难点,助力智慧矿山建设,全面提升矿企综合竞争力和可持续发展能力再次提供了政策支持。

雷科智途总经理黄琰
目前,我国有95%的一次性能源、80%以上的工业原材及大部分农业生产资料来源于矿产资源,因此矿业是我国重要的支柱产业之一。然而,据不完全统计,我国露天矿仅占已探明矿产资源的10%左右,近90%均为地下矿产。由于井下作业环境极为复杂,冲击地压、瓦斯、高温等自然灾害隐患大,对人员生命安全和企业财产安全形成威胁。但是,矿山具有场景相对封闭、路径规划明确、车辆在其中低速运行等特点,又为无人驾驶技术的发展和应用提供了良好的土壤。
近日中共中央办公厅、国务院办公厅印发的《关于进一步加强矿山安全生产工作的意见》,意见从严格矿山安全准入,推进矿山转型升级、防范化解重大安全风险、强化企业主体责任,强调推进矿山信息化、智能化装备和机,器人研发和应用。进一步明确了国家对于机械化换人、自动化减人、智能化无人的“绿色矿山”智能技术支持,为矿山的数字化、智能化生产指明了技术方向,推动智慧生产向前发展。
【黄琰指出】井下无人驾驶技术有较高的壁垒,我喜欢做这种有难度的事情。
1.万亿蓝海市场虽香,准入门槛极高
目前我国已开采矿山近4万余座,其中大型矿山4324座,智慧矿山的发展逐年呈倍数递增。随着政策的再次加码,预计截至今年末,智慧矿山行业市场规模将突破万亿元,预计到2025年,这一数字将接超过1.3万亿。其中,矿区无人驾驶的市场规模将达到238亿元。矿业智能化的万亿蓝海市场已经形成。
矿山作业场景对于无人驾驶来说,的确是更为庞大的“黑金矿藏”。但由于井下作业环境极为复杂,巷道内部以高热、高湿、微光、强光、粉尘、扬尘等特点为主,且无卫星和通讯信号覆盖,诸多恶劣环境因素对无人驾驶软、硬件都是极高的挑战。
雷科智途针对极端复杂的井工矿环境场景,攻克开发了“车 - 巷 - 云”井工矿无人驾驶全栈式系统,成为业内率先实现井工矿无人驾驶的综合方案提供商,填补了行业空白。

井下开采环境恶劣
【黄琰指出】调度、运营、协作、无人驾驶,雷科智途打造“井工矿无人车智慧管控平台”。
2.地上地下智慧管控的无人驾驶最优解
雷科智途“车 - 巷 - 云”井工矿无人驾驶全栈式系统之所以能够实现“井工矿无人车智慧管控”,主要基于雷科智途自研核心技术,能够充分满足井工矿路面端所需的井上物料运输,如车库诊断、自动派车等;进出井所需的车辆远程驾驶出入罐笼、无人驾驶出入斜井;井下作业所需的无人驾驶模式,如本地SLAM、行驶、经停、避让、协同控制,以及装卸、载人所需的无人驾驶停靠、远程驾驶介入、无人驾驶返回等。

井工矿剖面图(图片来源于网络)
“车 - 巷 - 云”井工矿无人驾驶
全栈式系统
“车 - 巷 - 云”井工矿无人驾驶全栈式系统主要包含车端系统、巷道系统、井工矿云控管理平台三个部分。
1.智能车端系统
井工矿无人驾驶车端系统,需要车辆满足煤安隔爆型防爆标准,在搭载AI视觉感知、4D点云毫米波雷达、激光雷达、远程控制器、域控制器、OBU(5G)等硬件的同时,还需要井工矿融合定位、多系统联动兼容、多传感感知融合等技术,从而具备车端无人驾驶能力。
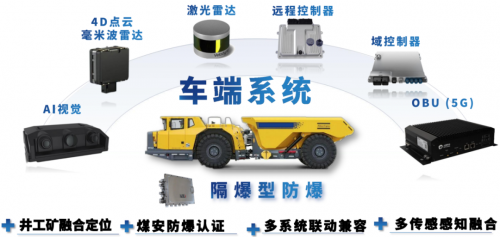
井工矿无人驾驶车端系统
井工矿无人驾驶的难点

巷道内灯光环境多为<15lux的弱光环境,导致常规视觉感知受限

水雾、灰尘浓度高,影响激光雷达的感知精度及可靠性,易造成虚警、建图细节不完整

无卫星定位,测量精度低,提取陆标点耗时长

人车混行,梯笼作业,对感知控制闭环精度<10cm,构建地图耗时长,鲁棒性差
井下恶劣环境应对方案
应对方案:4D毫米波雷达识别
相比激光雷达、摄像头和超声波雷达,雷科智途采用的毫米波鲁棒性好、穿透能力强、精度接近激光雷达、可全天时、全天候使用,适合作为煤矿机器人主动式传感器,其毫米波成像模式,可实现目标检测与识别、路径规划和导航。
应对方案:多元融合感知技术
雷科智途自研的多元融合感知技术包括,多横态数据融合:将不同传感器采集的数据进行融合,提高感知准确度。多源数据融合:横态的数据进行融合,提高感知可靠性。多传感器数据融合:将 不同传感器采集数据进行融合,提高感知范围和深度。
可实现覆盖扬尘、雾气、微光、强光等复杂条件;行人、作业车、作业设施等关键目标;封闭、开放等多样应用场景。
雷科智途自主研发的多元融合感知技术
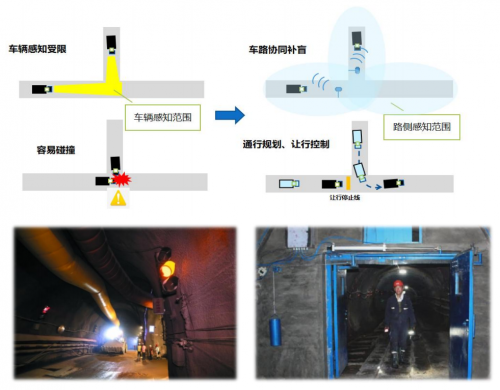
应对方案:车巷协同异构融合技术
雷科智途自研的车巷协同异构融合技术,可通过智能巷侧补盲场景,车辆超限感知,提前决策让行,确保安全为无人车运输提供有序调度。具有智能巷例拓展性高的特点,如路侧感知、边缘融合等特点,决策控制完全自主研发。同时,针对井下特殊环境,如风门开闭、人员/自行车危险异常行为、会车及拥堵预测、道路遗撒监控、彩虹灯信号控制等具备特有功能。
相比市场相近的路侧系统,具备更丰富场景,使井下辅助运输可优化调度,更高效、安全的管理。
雷科智途车巷协同异构融合技术具有识别风门开闭、彩虹灯、会车让行等特有功能
应对方案:车巷协同异构融合技术
雷科智途车巷协同异构融合技术,具有集群化调度联动整合,车辆设备作业状态监管与任务远程分配跨设备联动,可实现全系统无人化生产运行。具有智能巷例拓展性高的特点,如井工矿场景下铲运机、装卸机、卸料机、无人矿卡多设备联动,全系统无人化自动作业;作业面、装料口等高风险、高粉尘恶劣环境推动无人化进程;从自动驾驶到自动生产的矿产行业无人数字化赋能,提高全生产系统的感知决策能力。

井工矿集群联动作业
2.智能巷道系统
井工矿无人驾驶巷道系统,主要是利用单车无人、远程冗余、车巷协同解决辅运车辆在井下环境的无人驾驶应用,通过在路口建设激光雷达、视觉相机、毫米波雷达对路口车、人目标进行有效感知,当检测有盲区碰撞隐患时发布预警信息。
3.云控管理平台
具备无人驾驶能力的智能车端与具备多项辅助协调能力的智能巷道相融合,共同形成了井工矿场景下的V2X。这也使得云控管理平台具备了任务调度、行程管理、车辆监控、事件检测、路侧监测、注册管理、数据查询、拓展接口等能力,立体管理车辆状态。
借助5G等通信方式,云控管理平台可实现远程人机交互,可以随时人为主动介入,具备应急接管能力,如同操作驾驶模拟器一般简单便捷。
“车 - 巷 - 云”井工矿无人驾驶全栈式系统投入运营以来,从未触发过任何一次应急接管,系统始终平稳运行。

云控管理平台应急接管系统实景
市场观察所刊载信息,来源于网络,并不代表本媒体观点。本文所涉及的信息.数据和分析均来自公开渠道,如有任何不实之处、涉及版权问题,请联系我们及时处理。本文仅供读者参考,任何人不得将本文用于非法用途,由此产生的法律后果由使用者自负。投诉举报请联系邮箱:News_Jubao@163.com